FEALPy:有限元方法求解一维扩散方程
本文最后更新于:10 分钟前
有限元方法求解一维扩散方程
之前完成了 FEALPy 有限元求解 Poisson 方程 的数值算例, 通过湘潭大学王唯师兄的协助, 今天基于 FEALPy 运用有限元方法求解一个抛物型方程,为说明使用方法而又简单起见,于是理论部分专注于讨论下面这个一维的抛物型方程: \[ \begin{aligned} &\frac{\partial u}{\partial t}-a \frac{\partial^{2} u}{\partial x^{2}}=f(x, t), \quad(x, t) \in(0,1) \times(0, T] \\ &u(x, 0)=\psi(x), x \in[0,1] \\ &u(0, t)=u(1, t)=0, t \in[0, T] \end{aligned} \] ## 有限元方法推导
有限元方法相对于有限差分方法的一个巨大优势在于:对于复杂的几何区域, 网格可以画得非常 随意, 而有限差分法的格式需要建立在规则的网格上.
幸运的是, 复杂区域只存在于空间上, (通常) 并没有“复杂的时间区域” 这一说法, 毕竟时间是一维的, 一维空间上的连通区域都相似于直线、线段、射线之一, 都是相当简单的几何.
也就是说, 在时间轴上或许可以继续沿用有限差分法, 而在空间上采用有限元的方法. 回忆一下用有限元求解的 hello world 模型, 椭圆型问题: \[
\begin{aligned}
&-a \frac{\partial^{2} u}{\partial x^{2}}=f(x), \quad x \in(0,1) \\
&u(0)=u(1)=0
\end{aligned}
\] 是将其转化为弱形式, 找一个 \(u \in H_{0}^{1}(0,1)\), 使得: \[
a \int_{0}^{1} v^{\prime} u^{\prime} d x=\int_{0}^{1} f v d x
\] 对任意的 \(v \in H_{0}^{1}(0,1)\) 成立来达成的.
具体而言, 是构造一组基于空间的基函数, 使得解在基函数构成的空间中被逼近, 也就是 \[ u(x)=\sum_{i=0}^{N} c_{i} \phi_{i}(x) \] 每一个基函数的系数是固定的, 而对于今天这个时间依赖的抛物问题, 那就构造随时间变化的系数来表示好了, 也就是 \[ u(x, t)=\sum_{i=0}^{N} c_{i}(t) \phi_{i}(x) \] 再用弱形式写一下, 就是找到上面的 \(\mathrm{u}\), 使得对任意 \(v \in H_{0}^{1}(0,1)\), 都有 \[ \int_{0}^{1} v(x) \frac{\partial u}{\partial t} d x-a \int_{0}^{1} v(x) \frac{\partial^{2} u}{\partial x^{2}} d x=\int_{0}^{1} f(x, t) v(x) d x \] 运用分部积分公式换一换, 得到 \[ \int_{0}^{1} v(x) \frac{\partial u}{\partial t} d x+a \int_{0}^{1} v^{\prime}(x) \frac{\partial u}{\partial x} d x=\int_{0}^{1} f(x, t) v(x) d x \] 然后由于对于固定的t, 上式的成立也等价于 \[ \sum_{i=0}^{N}\left(c_{i}^{\prime}(t) \int_{0}^{1} \phi_{j}(x) \phi_{i}(x) d x+a \cdot c_{i}(t) \int_{0}^{1} \phi_{j}^{\prime}(x) \phi_{i}^{\prime}(x) d x\right)=\int_{0}^{1} f(x, t) \phi_{i}(x) d x \] 写成矩阵形式 \[ A C^{\prime}(t)+a K C(t)=F(t) \] 其中 1. \(C(t)=\left[c_{0}(t), c_{1}(t), \cdots, c_{N}(t)\right]\), 基函数系数 2. \(A=\left[\int_{0}^{1} \phi_{i} \phi_{j} d x\right]_{i j}\), 称为质量矩阵 3. \(K=\left[\int_{0}^{1} \phi_{i}^{\prime} \phi_{j}^{\prime} d x\right]_{i j}\), 是熟悉的全局刚度阵 4. \(F(t)=\left[\int_{0}^{1} \phi_{i}(x) f(x, t) d x\right]_{i}\), 是载荷向量
然后上面的式子就是更久之前所学习的常微分方程了, 当然这个常微分方程的求解还需要初值条件: \[ A C(0)=F(0) \] 其中 \(F(0)=\left[\int_{0}^{1} \phi_{i}(x) \psi(x) d x\right]_{i}^{T}\), 是个向量.
至此, 就可以开始求解方程了.
差分格式的介入
空间的处理交给了有限元方法, 而时间可以交给差分格式, 为了使用差分格式, 直接将时间 \([0, T]\) 离散为 \(t_{0}, t_{1}, \cdot, t_{M}\) .然后再用
向前 Euler 格式, 得到 \[ \begin{array}{r} A \frac{C_{k+1}-C_{k}}{\Delta t}+a K C_{k}=F\left(t_{k}\right) \\ C_{0}=A^{-1} F_{0} \end{array} \] 或者向后 Euler 格式 \[ \begin{array}{r} A \frac{C_{k}-C_{k-1}}{\Delta t}+a K C_{k}=F\left(t_{k}\right) \\ C_{0}=A^{-1} F_{0} \end{array} \] 或者二阶精度的中心 Euler 格式 \[ \begin{array}{r} A \frac{C_{k+1}-C_{k}}{\Delta t}+a K \frac{C_{k}+C_{k+1}}{2}=F\left(t_{k+\frac{1}{2}}\right) \\ C_{0}=A^{-1} F_{0} \end{array} \] 或者按需选取别的格式...
还需要处理的就是两处数值积分了 \(F(t)\) 和 \(F_{0}\) 了, 如同往常, 采用Gauss积分公式求解即可.
数值算例
考虑二维抛物方程:
\[ \begin{cases}\frac{\partial u(\vec{x}, t)}{\partial t}-\Delta u(\vec{x}, t)=(2\pi^2-1)\sin (\pi x_1)\sin (\pi x_2) e^{-t}, & (\vec{x}, t) \in \Omega \times (0,1]\\ u(\vec{x}, t)=\sin (\pi x_1)\sin (\pi x_2) e^{-t}, & (\vec{x}, t) \in \Omega\times 0\\ u(\vec{x}, t)=\sin (\pi x_1)\sin (\pi x_2) e^{-t}, & (\vec{x}, t) \in \partial \Omega\times[0,1]\end{cases} \]
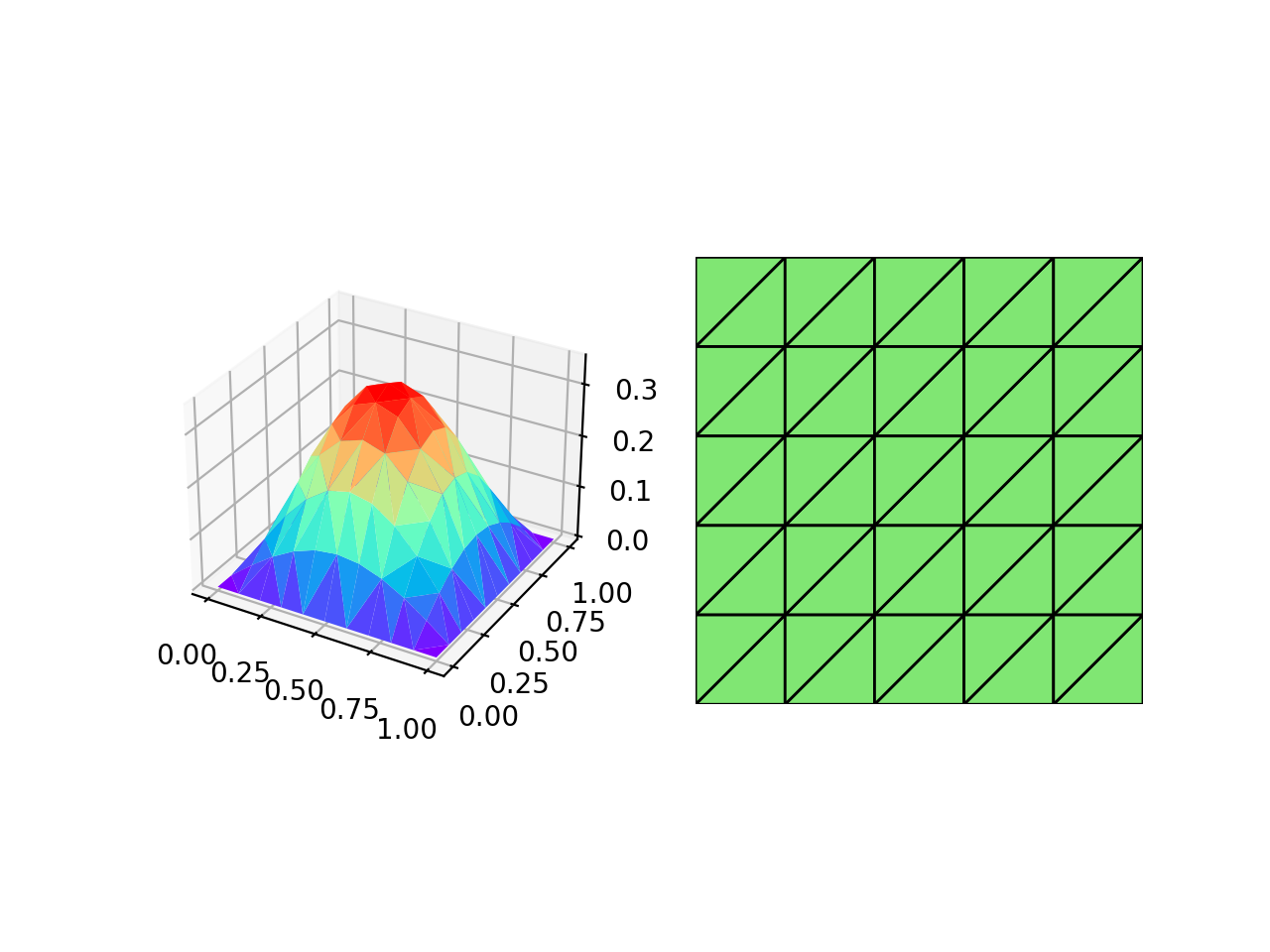
其中, 空间区域 \(\Omega:=[0,1]\times[0,1]\), 其真实解为 \(u(\vec{x}, t)=\sin (\pi x_1)\sin (\pi x_2) e^{-t}\) .
下面演示基于 FEALPy 求解这个算例的过程.
1 | |
数值结果: 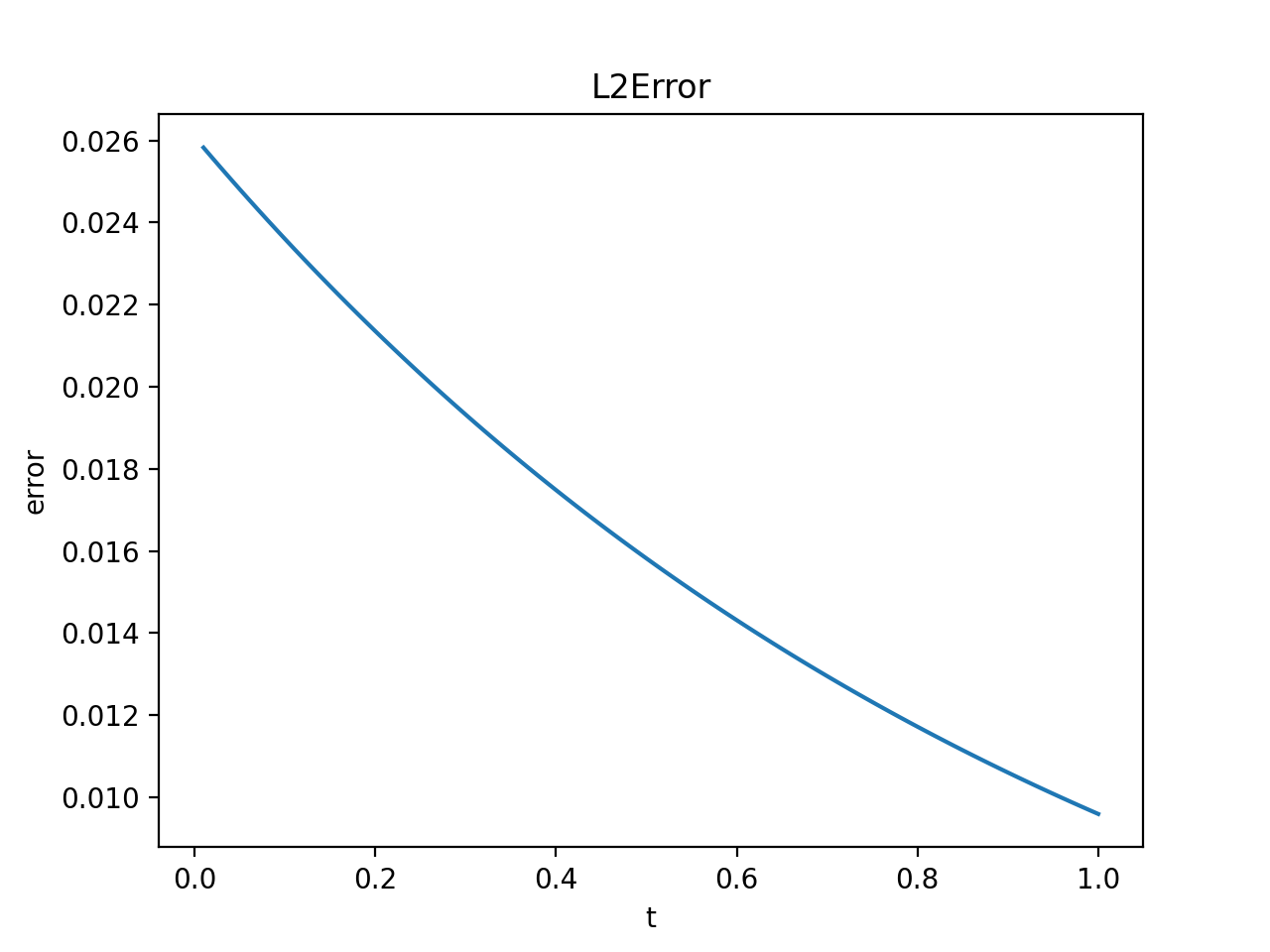
 >本人水平有限, 若有错误, 欢迎联系批评指正 > >作者邮箱: turingscat@126.com
>本人水平有限, 若有错误, 欢迎联系批评指正 > >作者邮箱: turingscat@126.com
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!